多模态论文笔记——ViT、ViLT

大家好,这里是Goodnote(好评笔记)。本文详细介绍Transformer架构在计算机视觉方面的成功模型,将Transformer引入图像领域:ViT、ViLT。

ViT
ViT(Vision Transformer) 是一种将 Transformer 模型用于计算机视觉任务中的创新架构。ViT 只使用了 Transformer 的编码器 部分进行特征提取和表征学习。
论文:AN IMAGE IS WORTH 16X16 WORDS:TRANSFORMERS FOR IMAGE RECOGNITION AT SCALE
1. ViT的基本概念
ViT 的核心思想是将传统的(CNN)的卷积操作替换为 Transformer 的注意力机制,借鉴 Transformer 模型在自然语言处理(NLP)中的成功经验,用于图像分类任务。
2. ViT的结构与工作流程
ViT的架构如下图所示:
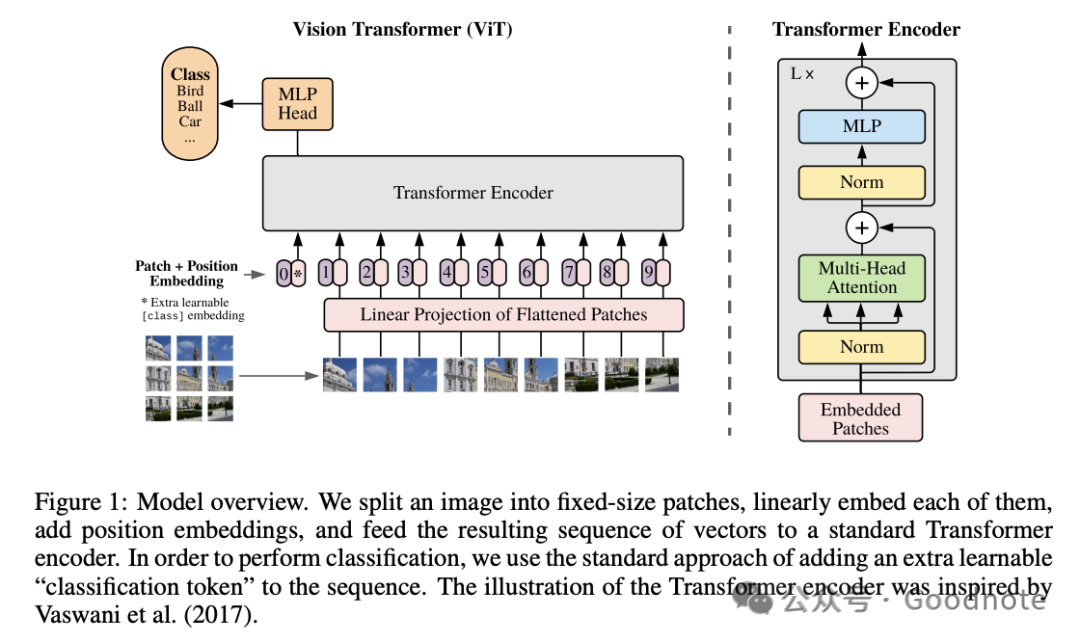
图1:模型概览。我们将一幅图像分割为固定大小的图块,将每个图块线性嵌入(embed),添加位置嵌入(position embedding),并将得到的向量序列输入到标准的Transformer编码器中。为了实现分类任务,我们采用标准的方法,在序列中添加一个额外的可学习的“分类标记”(classification token)。Transformer编码器的示意图受到 Vaswani 等人 (2017) 的启发。
ViT 模型的工作流程如下:
1. 图像分块(Image Patch Tokenization)
ViT 将输入的图像划分为固定大小的图像块(patches),并将这些图像块展开为一维向量,类似于将图像分成许多小的"单词"。然后,将每个图像块转换为一个嵌入向量,这些嵌入向量类似于 NLP 中的词嵌入(Word Embedding)。
- 假设输入图像的尺寸是 ,将其划分为尺寸为 的小块。这将产生 个图像块。
- 每个图像块的像素值被展平成一维向量,并通过线性映射(全连接层)转换为固定维度的嵌入向量。
2. 位置编码(Positional Encoding)
因为 Transformer 的注意力机制不依赖于输入的顺序,而图像中的空间信息是重要的,因此需要给每个图像块添加位置编码(Positional Encoding),以保留图像块的位置信息。这样,Transformer 可以理解图像块之间的相对位置关系。
- 位置编码的方式与 NLP 中的 Transformer 类似,ViT 默认使用 可学习的1D位置编码,将二维图像的分割图块按照固定顺序展平成一维序列后,为序列中的每个位置分配一个可学习的编码向量。
We use standard learnable 1D position embeddings, since we have not observed significant performance gains from using more advanced 2D-aware position embeddings (Appendix D.4)
本文主要解读默认的位置编码,后续提到的ViLT的编码也是“可学习的1D位置编码”。
后序其他模型有优化使用基于频率的二维位置编码(2D Frequency Embeddings) 来编码图像块的位置。详情请参考:深度学习笔记——常见的Transformer位置编码
3. Transformer 编码器(Transformer Encoder)
图像块和位置编码结合后,作为输入送入 Transformer 编码器。Transformer 编码器的每一层由多头自注意力机制(Multi-Head Self-Attention)和前馈神经网络(Feed-Forward Network, FFN)组成,并通过残差连接和层归一化来保持梯度稳定性。
- 多头自注意力机制:每个图像块与其他所有图像块之间的相似性通过自注意力机制计算,模型通过这种机制捕捉全局的特征表示。
- 前馈神经网络(FFN):每个图像块的特征表示通过前馈网络进一步提炼。
这个过程类似于传统的 Transformer 中对词的处理,只不过这里处理的是图像块。
4. 分类标记(Classification Token)
ViT 模型在输入图像块之前,通常会添加一个分类标记([CLS] Token)。这个分类标记类似于 BERT 模型中的 [CLS] 标记,用来代表整个图像的全局特征。最终,经过 Transformer 编码器的处理后,CLS 标记的输出被用于进行图像分类。
- CLS 标记的输出经过一个全连接层,将其映射到目标类别空间中,得到最终的分类结果。CLS 是 “classification” 的缩写,表示分类。它是一个附加到图像块序列之前的向量,类似于 BERT 模型中处理文本任务时添加的 [CLS] 标记。CLS 标记没有直接对应于任何特定的图像块,它只是一个特殊的向量,用于捕获整个图像的全局信息。
[0.9, 0.05, 0.05]
表示 90% 的概率是“猫”,5% 的概率是“狗”,5% 的概率是其他类别。
具体过程:
- 输入序列:输入序列是由图像块嵌入和位置编码的结合体,且在序列的最前面插入了[CLS] Token。这个序列的形式如下:
- 其中[CLS]是分类标记,是图像的第个块。
- Transformer编码器处理:整个序列(包括[CLS] Token和图像块嵌入)会通过Transformer编码器进行处理。由于Transformer的自注意力机制(Self - Attention) 能够让每个标记关注序列中的所有标记,因此[CLS] Token会在计算过程中与所有图像块交互,“吸收”整个图像的全局信息。
- 输出全局表示:经过多层Transformer处理后,[CLS] Token的最终输出向量被认为是整个图像的全局特征表示。这一特征向量能够有效总结图像中的全局信息。
- 分类任务:最终,[CLS] Token的输出经过一个全连接层(fully connected layer),将它映射到类别标签的维度空间,用于图像的分类任务。具体来说,[CLS] Token的输出向量会通过线性变换和softmax得到每个类别的概率分布,最终用于决策。
3. ViT的关键组件
1. 图像分块(Patch Embedding)
ViT 将图像划分为固定大小的图像块,并将其展平为一维向量。这与传统 CNN 的卷积操作不同,CNN 的卷积操作是基于局部感受野,而 ViT 直接处理全局特征。
2. 多头自注意力机制(Multi-Head Self-Attention)
ViT 的核心是使用多头自注意力机制来计算每个图像块与其他图像块之间的关系。与 CNN 通过层级卷积提取特征不同,ViT 通过全局的自注意力机制捕捉图像的特征表示。
3. 位置编码(Positional Encoding)
ViT 通过位置编码来为每个图像块提供位置信息,这在视觉任务中是非常重要的,因为图像块的相对位置对分类任务有重要影响。
4. ViT与CNN的对比
| 对比维度 | CNN | ViT (Vision Transformer) |
|---|---|---|
| 局部 vs 全局 | 依赖于卷积核的局部感受野,逐层提取局部特征并组合成全局特征 | 通过自注意力机制直接捕捉图像块之间的全局关系 |
| 参数规模 | 通常参数较少,适合处理小数据集,具有较好的泛化能力 | 通常拥有更多参数,在小数据集上容易过拟合,但在大规模数据集上效果出色 |
| 数据需求 | 在小数据集上表现稳定,具有先验信息(如卷积操作中的平移不变性) | 缺少 CNN 中的先验信息,因此需要大规模数据集进行训练,在小数据集上表现不如 CNN |
5. ViT的优势和挑战
优势
- 全局信息捕捉:ViT 通过自注意力机制能够直接捕捉图像块之间的全局关系,而不依赖于局部的卷积操作。这在处理一些全局依赖性较强的任务时表现出色。
- 充分利用数据的丰富性:ViT 在大规模数据集上训练时,能够充分利用数据的丰富性,并展示出优越的性能。尤其在超大规模数据集(如 ImageNet21k、JFT-300M)上,ViT 的性能超过了传统 CNN。
挑战
- 数据需求量大:ViT 模型的参数量较大,因此需要大规模的数据集来训练。如果数据集规模较小,ViT 容易过拟合。
- 训练复杂:与 CNN 相比,ViT 的训练更复杂,尤其在资源有限的情况下,训练大规模的 ViT 模型会面临内存和计算资源的挑战。
6. ViT的应用
主要用于图像分类任务,但其架构可以扩展到其他计算机视觉任务,如目标检测、图像分割、视觉问答等。由于其全局特征捕捉能力,ViT 在一些需要处理全局上下文的任务中表现尤为出色。
7. ViT 与 CNN 的混合模型 Hybrid ViT
Hybrid ViT 是一种将 CNN 和 Transformer 结合的架构,它将 CNN 用于特征提取,Transformer 用于全局建模。可以补充,这种混合模型可以在一定程度上解决 ViT 在小数据集上的表现问题,并保留 Transformer 全局建模的优点。
ViLT
ViLT(Vision-and-Language Transformer) 是一种解决视觉与语言的联合任务的多模态模型。使用Transformer 的编码器将视觉信息和语言信息整合在同一Transformer架构中。
它去除了传统视觉-语言模型中的卷积神经网络,ViLT 的主要创新点在于它不依赖卷积神经网络(CNN)来处理图像,而是通过直接将图像块和文本输入给 Transformer 模型,实现视觉和语言的早期融合。
与传统的视觉-语言模型有显著不同,传统模型通常会先提取,再结合(先通过卷积网络提取视觉特征,通过NLP模型提取文本特征,再与语言特征结合)。
早期融合和晚期融合指的是进入 Transformer 编码器的顺序,早期融合,在融合后再进入Transformer。但是CLIP等模型,是经过Transformer提取特征后再进行对比,属于晚期融合。
论文:ViLT: Vision-and-Language Transformer Without Convolution or Region Supervision
1. ViLT 的工作流程
ViLT的结构如图所示:
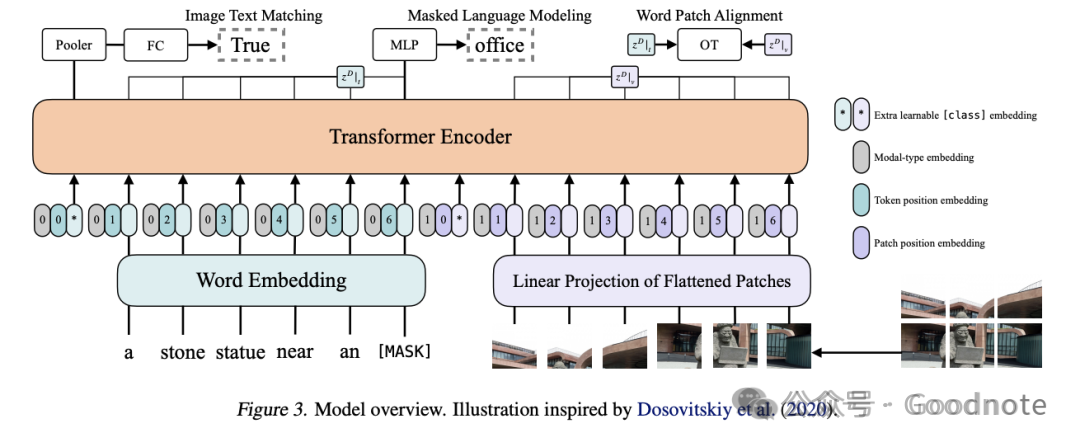
ViLT 直接通过Transformer对图像和文本进行早期融合处理,它的工作流程可以概括为以下几个步骤:
1. 图像和语言的输入处理
- 图像输入:与 ViT(Vision Transformer)类似,ViLT 通过将输入图像划分为固定大小的图像块(patch)。例如,一个 的图像可以划分成多个 的图像块,展平后形成向量序列。
- 语言输入:文本输入通过词嵌入(Word Embedding)表示为向量。文本的输入与 BERT 模型中的处理类似。
2. 图像和语言的融合
ViLT 的核心是通过单一 Transformer 模型同时处理图像和语言数据。其输入序列是图像块和词嵌入的融合。具体步骤如下:
- 图像块嵌入+位置编码:每个图像块被展平成一维向量,并与对应的位置编码(Positional Encoding) 结合在一起,类似于 ViT的(一维可学习的位置编码)。
- 文本嵌入+位置编码:文本序列通过嵌入层映射为固定维度的向量,并且每个词也被添加位置编码。
- 联合输入:图像块嵌入和文本嵌入会串联在一起,作为 Transformer 的输入序列。如下:
文本 token 嵌入在前,图像 patch 嵌入在后。文本和图像块前各有一个【CLS】。
3. 自注意力机制
ViLT 使用自注意力机制来捕捉图像块和文本词之间的相互关系。通过多头自注意力机制,模型可以让每个输入块(无论是图像还是词)与其他块交互,捕捉图像和语言之间的上下文信息。
这种全局的注意力机制能够高效地融合视觉和语言信息,从而使得模型能够处理如图文匹配、视觉问答等跨模态任务。
4. 输出处理
最终,ViLT 的输出经过 Transformer 编码器处理,得到的结果可以用于多种下游任务。具体根据任务的不同,输出会有不同的处理方式:
图文匹配(Image-Text Matching)
- 使用分类头(由 Pooler 和全连接层组成),判断输入图像和文本是否匹配,输出 True 或 False。
Pooler 是一个用于对特定位置的嵌入(通常是 [class] token 的嵌入)进行处理的模块,常用于生成分类或全局上下文的特征表示。
掩码语言建模(Masked Language Modeling, MLM)
- 输入序列中某些单词被掩码 ,模型预测这些被掩码单词的值。
- 通过多层感知机(MLP)输出被掩码单词的预测值(例如 “office”)。
是从 BERT 模型中借鉴的语言建模任务,用于训练模型的语言理解能力。
单词-图块对齐(Word-Patch Alignment)
- 模型对文本中的单词和图像中的图块进行对齐,通过 OT(Optimal Transport, 最优传输)计算对应关系。
- Transformer 编码器的输出 , 分别表示文本和图像的嵌入特征。
最优传输(OT)为多模态任务中的语义对齐提供了一种强大而高效的方法。通过对分布之间的最佳匹配建模,它能够细致捕捉单词与图块的语义关系,同时具有理论和计算上的稳健性。在多模态学习中,它不仅能提升对齐质量,还能为复杂的任务(如跨模态检索和问答)提供可靠的支持。
2. ViLT 的主要创新点
1. 无卷积特征提取器
与传统的视觉-语言模型(如 LXMERT、UNITER 等)不同,ViLT 不使用卷积神经网络,而是直接将图像切分成小块后,使用 Transformer 模型对图像和文本进行融合处理。
- 优势:减少了模型的计算开销,因为不需要预训练一个大型 CNN 模型来提取视觉特征。
- 挑战:直接处理图像块可能在细粒度视觉理解任务上存在性能瓶颈,尤其是在需要精细局部信息时。
2. 视觉和语言的早期融合
ViLT 通过早期融合(early fusion)的方式,将图像块和文本词嵌入直接结合在 Transformer 的输入中。
早期融合和晚期融合指的是进入 Transformer 编码器的顺序,早期融合,在融合后再进入Transformer。但是CLIP等模型,是经过Transformer提取特征后再进行对比,属于晚期融合。
什么时候用 CLIP,什么时候用 ViLT?
-
使用 CLIP:
- 当需要进行 图像-文本检索(给定图像或文本检索相关配对)时,CLIP 的对比学习在跨模态检索方面表现优异。
- 零样本分类任务,CLIP 在没有类别标签的条件下,通过类别描述实现分类,无需对新类别进行微调。
- 常规的 图像分类 场景中,CLIP 由于有强大的跨模态对比能力,可以使用类别描述进行分类,而不需要针对每个类别进行单独的训练。
-
使用 ViLT:
- 视觉问答(VQA) 或 图文匹配 任务中,ViLT 的早期融合能捕捉图像和文本间的细粒度关系,适合需要图像-文本联合推理的任务。
- 细粒度的图文理解 任务中,如果任务需要在图像的局部信息和文本的上下文之间进行交互,ViLT 可以更有效地捕捉图像和文本之间的深层语义关系。
总结:
- CLIP 适合在 跨模态检索、零样本分类 和 简单图像分类 场景中使用。
- ViLT 则更适合 视觉问答、图文匹配 和 细粒度图文理解 场景。
CLIP详细介绍参考:多模态论文笔记——CLIP
3. 简化的架构
通过使用单一的 Transformer 模型处理图像和文本,ViLT 提供了一种简化的架构,避免了传统视觉-语言模型中分别处理图像和文本的复杂性。这种设计大大简化了模型的计算流程,同时在许多视觉-语言任务上仍然保持了很高的性能。
3. ViLT 的优缺点
优点
- 计算效率高:由于不使用 CNN 或区域提取网络(如 Faster R-CNN),ViLT 相比传统视觉-语言模型具有更少的计算开销,训练和推理速度更快。
- 模型简洁:单一的 Transformer 模型处理视觉和语言,避免了复杂的多模块设计,架构简单易于扩展。
- 多模态融合效果好:通过早期融合,ViLT 能够捕捉图像和语言的全局上下文信息,表现出色。
缺点
- 精细视觉特征提取能力较弱:由于没有使用卷积神经网络进行图像特征提取,ViLT 在处理需要细粒度视觉理解的任务时,可能性能不如传统模型。这是因为 Transformer 对局部信息的提取能力不如 CNN。
- 对大规模数据集的依赖:和 Vision Transformer 类似,ViLT 在较小数据集上的表现可能不如传统方法,因此需要大规模数据集进行预训练才能发挥最佳性能。